
近日,机器人所黄博教授团队在机器人领域权威顶级期刊《IEEE Transactions on Robotics》发表题为“Dynam-SLAM: An Accurate, Robust Stereo Visual-Inertial SLAM Method in Dynamic Environments”的研究论文。该文章第一作者为博士生阴贺生,通讯作者为黄博教授。《IEEE Transactions on Robotics》为机器人学领域公认的国际顶级期刊之一,要求论文在理论及工程实践上均能为机器人学发展作出重要贡献,其每年全球发文量约80-100篇,代表了机器人领域先进的重大进展,定位与规划方面的里程碑著作多数发表在该期刊上。
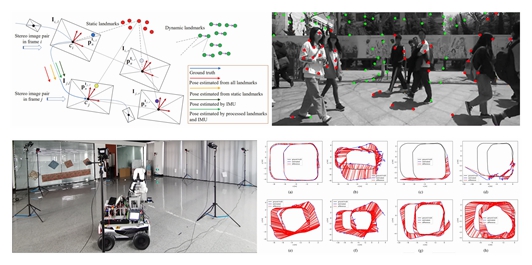
作为机器人自主定位和环境感知的重要技术,同时定位与地图构建(SLAM)已经成为机器人学领域重要的关注焦点。当前现有的视觉SLAM系统具有观测绝对静态的强假设,在高动态环境中不能很好地工作。该工作致力于构建能够在高动态环境下鲁棒、准确并可以持续工作的立体视觉-惯性SLAM系统,提出将立体视觉场景流与惯性测量单元结合起来进行动态特征检测,并进一步将动态、静态特征与IMU测量紧耦合进行非线性优化。
这项工作从18年开始着手进行,从早期的深度图并行加速处理,到基于场景流构建的动态特征识别,并最终搭建了多传感器融合的SLAM系统,经历了多项技术的不断探索和实践。该方法相比于学界已有方法,在连续、强冲击下的高动态应用场景中,其准确性和鲁棒性显著提升。目前,课题组正在进一步优化该技术并着重将其产品化,以推动其在机器人、无人车及移动终端设备上的实际应用。
近年来,校区机器人所在机器人自主导航、软体机器人动力学与新型驱动传感技术等方面已发表多篇顶级期刊,在核电、应急、农业、水下等场景取得系列应用成果,研究工作的持续深化有望取得更大突破。
论文链接: https://ieeexplore.ieee.org/document/9866888
